Media Summary: Transformations, Angular representations, Metrics, Efficient collision checking See ... We combine the scalability of the MAPF algorithm LaCAM with kinodynamic This video accompanies the paper entitled "Distributed Nonlinear Trajectory Optimization for
Multi Robot Motion Planning 2 - Detailed Analysis & Overview
Transformations, Angular representations, Metrics, Efficient collision checking See ... We combine the scalability of the MAPF algorithm LaCAM with kinodynamic This video accompanies the paper entitled "Distributed Nonlinear Trajectory Optimization for This paper appears in: IEEE Transactions on Control Systems Technology Print ISSN: 1063-6536 Online ISSN: 1558-0865 Digital ... Title: Asynchronous Task Plan Refinement for This is the presentation for our work at ICRA 2025. Feel free to contact us at Ashley.Foster.plymouth.ac.uk.
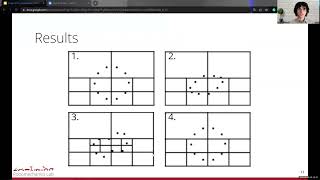
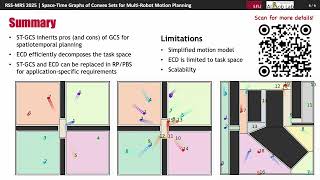
Jingtao Tang, Zining Mao, Lufan Yang, and Hang Ma, "Space-Time Graphs of Convex Sets for ICASP 17: multi-robot motion planning [scene 2] Hierarchical Temporal Logic Task and Motion Planning for Multi Robot Systems Supplementary video for the IROS 2023 paper "Differentiable Task Assignment and

![Multi-Robot Planning [Lecture, Marija Popović]](https://i.ytimg.com/vi/Wcvw8qyUan8/mqdefault.jpg)







![An Efficient NSGA-II-based Algorithm for Multi-Robot Coverage Path Planning [ICRA 2025]](https://i.ytimg.com/vi/5JHAO7yrw0s/mqdefault.jpg)

![ICASP 17: multi-robot motion planning [scene 2]](https://i.ytimg.com/vi/IaAXXHGGgKs/mqdefault.jpg)

