Media Summary: We combine the scalability of the MAPF algorithm LaCAM with kinodynamic Transformations, Angular representations, Metrics, Efficient collision checking See ... Hierarchical Temporal Logic Task and Motion Planning for Multi Robot Systems
Multi Robot Motion Planning With Diffusion Models - Detailed Analysis & Overview
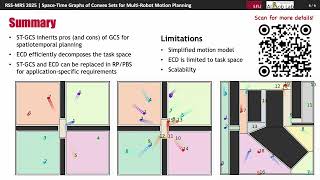
We combine the scalability of the MAPF algorithm LaCAM with kinodynamic Transformations, Angular representations, Metrics, Efficient collision checking See ... Hierarchical Temporal Logic Task and Motion Planning for Multi Robot Systems Jingtao Tang, Zining Mao, Lufan Yang, and Hang Ma, "Space-Time Graphs of Convex Sets for Justin Kottinger, Shaull Almagor, and Morteza Lahijanian, "MAPS-X: Explainable W. Jung∗, U. A. Mishra∗, N. R. Arachchige, Y. Chen†, D. Xu†, S. Kousik†, "Joint
Short presentation for the paper: A. Theurkauf, J. Kottinger, N. Ahmed, and M. Lahijanian, “Chance-Constrained Hierarchical Temporal Logic Task and Motion Planning for Multi-Robot Systems




![Multi-Robot Planning [Lecture, Marija Popović]](https://i.ytimg.com/vi/Wcvw8qyUan8/mqdefault.jpg)






![[Teaser] JM2D: Joint Model-based Model-free Diffusion for Planning with Constraints](https://i.ytimg.com/vi/Tala6nTuy5w/mqdefault.jpg)


