Media Summary: Video for the ICRA 2021 submission. Preprint: Code: ... This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Trajectory planning, Part 2: Polynomial function
Generating Large Scale Trajectories Efficiently Using Double Descriptions Of Polynomials - Detailed Analysis & Overview
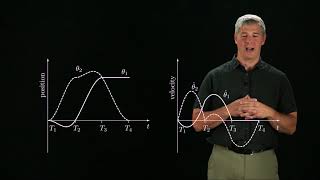
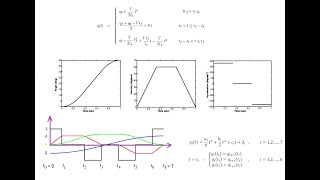
Video for the ICRA 2021 submission. Preprint: Code: ... This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Trajectory planning, Part 2: Polynomial function Optimal Polynomial Trajectory Planning Video 2 Optimal Polynomial Trajectory Planning Video 1 This paper focuses on finding robust paths for a robotic system by taking into account the state uncertainty and the probability of ...
Summary video for the paper "Enhancing Bilevel Optimization for UAV Time-Optimal Short videos of topics in UCLA's Life Science 30A (Mathematics for Life Sciences). Lecturer is Prof. Alan Garfinkel.