Media Summary: This video is supplementary Material to The paper; " A numerically-stable Video illustrating the article: Marius Beul and Sven Behnke: "Fast Full State Safe handling of dynamic highway and inner city scenarios with autonomous vehicles involves the problem of
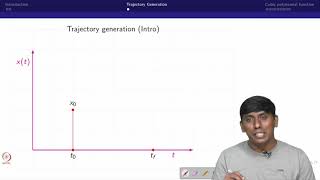
Trajectory Generation For Multirotors - Detailed Analysis & Overview
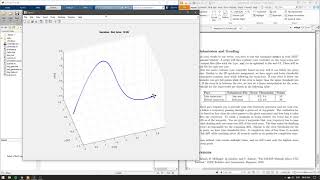
This video is supplementary Material to The paper; " A numerically-stable Video illustrating the article: Marius Beul and Sven Behnke: "Fast Full State Safe handling of dynamic highway and inner city scenarios with autonomous vehicles involves the problem of Sarah Tang, Koushil Sreenath, and Vijay Kumar. Presented at the International Symposium on Robotics Research (ISRR). Puerto ... A triple integrator model is used to solve the optimization problem. Velocity, Acceleration and Jerk constraints are also considered. Video for the RA-L/IROS 2020 submission. Preprint: Code: ...
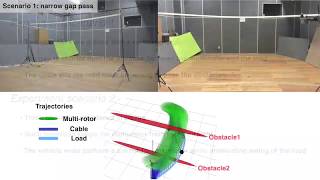
Supplement video for the 2019 RAL-ICRA submission: Optimal Hello everyone today Romo metrics will be focusing on Supplement video (extended version) for the 2019 RAL-ICRA submission: Optimal Supplement video for the 2019 RAL-IROS submission: Robust and Efficient Quadrotor In this work, we use a quadrotor to transport cable-suspended payloads. While previous work has focused on load stabilization ... Status: IEEE Robotics and Automation Letters (RA-L) 2020 ...