Media Summary: Video Author: Johannes Weck Video Submission for ICRA 2021. Abstract: The problem addressed in this paper is that of an ... This video presents a research project on PRM-Based Global Planning for We present a novel Deep Reinforcement Learning (DRL) based policy to compute
Spiderbug Mobile Robot Navigation Using Dynamic Webs - Detailed Analysis & Overview
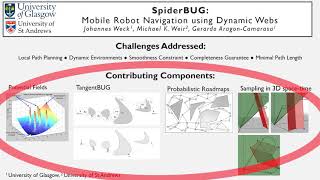
Video Author: Johannes Weck Video Submission for ICRA 2021. Abstract: The problem addressed in this paper is that of an ... This video presents a research project on PRM-Based Global Planning for We present a novel Deep Reinforcement Learning (DRL) based policy to compute Speaker: Gonzalo Ferrer - Skoltech The task of In this video the problem of online trajectory optimization and cooperative collision avoidance is addressed when several ... Neural Signed Distance Fields (SDFs) provide a differentiable environment representation to readily obtain collision checks and ...
Step into the Future of Robotics! Join our 5-Day Hands-On Workshop on Autonomous This is the first part/background to my new project series about By combining off-the-shelf sensors and sensor fusion techniques FZI and IRT Jules Verne have developed together the Human Aware CALTECHS MULTI-MODAL MOBILITY MORPHOBOT M4 For copyright matters, ... Xuan Tung Truong and Trung Dung Ngo The More-Than-One