Media Summary: Speaker: Gonzalo Ferrer - Skoltech The task of We present a novel Deep Reinforcement Learning (DRL) based policy to compute By combining off-the-shelf sensors and sensor fusion techniques with a custom-built reinforcement learning AI algorithm, we are ...
Robot Navigation In Dynamic Environments - Detailed Analysis & Overview
Speaker: Gonzalo Ferrer - Skoltech The task of We present a novel Deep Reinforcement Learning (DRL) based policy to compute By combining off-the-shelf sensors and sensor fusion techniques with a custom-built reinforcement learning AI algorithm, we are ... FZI and IRT Jules Verne have developed together the Human Aware Mobile Abstract: In this work, we present a learning-based pipeline to realise local Human-friendly robot navigation in dynamic environments
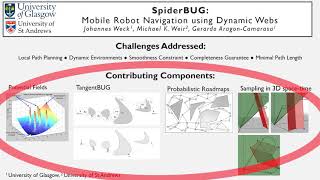
Xuan Tung Truong and Trung Dung Ngo The More-Than-One Neural network from arena-rosnav ( which tries to avoid collisions against moving ... Video Author: Johannes Weck Video Submission for ICRA 2021. Abstract: The problem addressed in this paper is that of an ... Velocity-Scaled Safe Artificial Potential Field for Mobile Robot Navigation in Dynamic Environments This video presents a research project on PRM-Based Global Planning for Mobile Daniel Honerkamp, Tim Welschehold, Abhinav Valada N2M2: Learning
John J. Leonard is Samuel C. Collins Professor of Mechanical and Ocean Engineering in the MIT Department of Mechanical ... Neural Signed Distance Fields (SDFs) provide a differentiable This paper proposes a compositional framework of neural SDFs to solve
















![THOUZER autonomous navigation in highly dynamic environment [E-SERIES Feature]](https://i.ytimg.com/vi/vzUtQyRuR2A/mqdefault.jpg)
