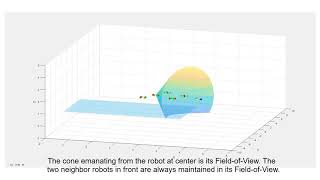
Media Summary: See www.asrl.us for more information. Tansel Yucelen and Dzung Tran. Formation control: Creating formation with obstacles Above animation demonstrates working of cooperative collision avoidance law integrated
Formation Control Using Multiplex Network - Detailed Analysis & Overview
See www.asrl.us for more information. Tansel Yucelen and Dzung Tran. Formation control: Creating formation with obstacles Above animation demonstrates working of cooperative collision avoidance law integrated This is the presentation video for the paper ”Distance-based This video presents the experiments performed in the scope of the M.Sc. Thesis of Pedro Trindade, entitled "Distributed Z. Kan, A. Dani, J. M. Shea, and W. E. Dixon, "
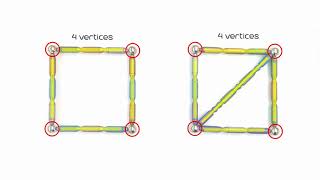
Under an arbitrary changing topology, the agents converge to their desired shape defined as a square. The J. Alonso-Mora, E. Montijano, T. Naegeli, O. Hilliges, M. Schwager and D. Rus "Distributed Collision-free Formation Control of Multiple Nano-quadrotors Uni of Adelaide I made the clip, but the algorithm is