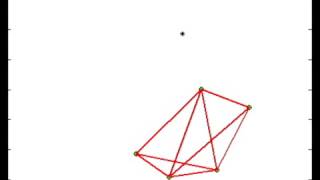
Media Summary: Z. Kan, A. Dani, J. M. Shea, and W. E. Dixon, " Second experiment running all robot data recorded as text file in robot, will available soon either in matlab/ GNU-Octave and png ... Formation + decentralized connectivity + collision avoidance Control
Network Connectivity Decentralized Formation Control Simulation 2 - Detailed Analysis & Overview
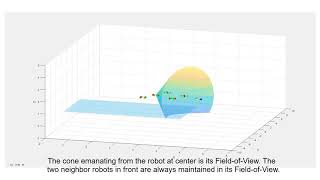
Z. Kan, A. Dani, J. M. Shea, and W. E. Dixon, " Second experiment running all robot data recorded as text file in robot, will available soon either in matlab/ GNU-Octave and png ... Formation + decentralized connectivity + collision avoidance Control Takahashi Research Group: Project Page: DOI: ... Decentralized multiple V formation control in time varying network topologies Distributed distance-bearing control illustrated with two
We consider the problem of controlling a group of agents to achieve a desired geometric Done by M. Iqbal and Trung Dung Ngo Abstract: We consider the problem of Time-varying formation control of multi-UAV with tree network Paper: Tognon M, Yüksel B, Buondonno G, Franchi A. Dynamic