Media Summary: This video is achieved by improved A-star algorithm. We translate the multiple Transformations, Angular representations, Metrics, Efficient collision checking See ... Kai Gao and Jingjin Yu We investigate the problem of
Dual Robots Coordination Motion Planning - Detailed Analysis & Overview
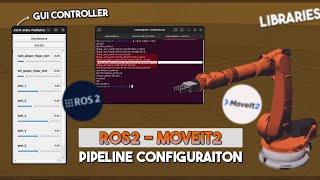
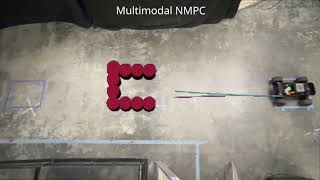
This video is achieved by improved A-star algorithm. We translate the multiple Transformations, Angular representations, Metrics, Efficient collision checking See ... Kai Gao and Jingjin Yu We investigate the problem of Lets cover important steps for MoveIt2 integeration in ROS2. Learn how to set up the Kuka arm, add controllers. You can also ... In this video, we present a receding-horizon, sampling-based trajectory optimization approach capable of reasoning over ... This video demonstrates tele-operation of
This work is achieved by improved A* algorithm. This video demonstrates the capabilities of Asynchronous Decentralized (Revised) Prioritized