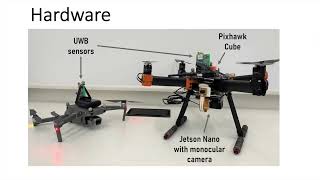
Media Summary: Value Iteration for Distributed Formation Control - BYU Algorithms for Decision Making Third-Order Consensus for Robust Distributed Formation Control of Double Integrator Vehicles We address the integration of onboard perception and decision layers in a
Distributed Formation Control - Detailed Analysis & Overview
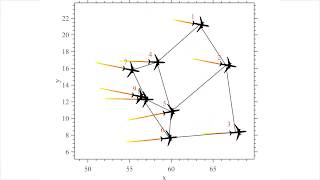
Value Iteration for Distributed Formation Control - BYU Algorithms for Decision Making Third-Order Consensus for Robust Distributed Formation Control of Double Integrator Vehicles We address the integration of onboard perception and decision layers in a Distributed Formation Control of Double-Integrator Vehicles with Disturbance Rejection