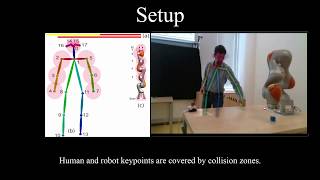
Media Summary: My lecture at the IROS 2021 workshop "From Presented in the 10th International Workshop on For details, please check our paper: "A Dynamical System Approach to Task-Adaptation in
Dissipative Control For Physical Human Robot Interaction - Detailed Analysis & Overview
My lecture at the IROS 2021 workshop "From Presented in the 10th International Workshop on For details, please check our paper: "A Dynamical System Approach to Task-Adaptation in In this paper, the problem of making a safe compliant contact between a A demonstration of teaching varying compliance behavior using Svarny, P.; Tesar, M.; Behrens, J. K. & Hoffmann, M. (2019), Safe
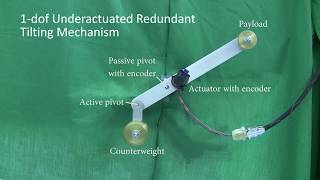
This video demonstrates the effectiveness of the macro-mini In this paper, we present a framework that unites obstacle avoidance and deliberate Presented in the 16th Annual Conference on Towards Autonomous Oregon State Professor Heather Knight and Agility's Head of Customer Experience Bambi Brewer get together to talk about ... This video demonstrates the concept of underactuated redundancy for





![Adaptive physical Human-Robot Interaction using Dynamical Systems [Clearpath Ridgeback]](https://i.ytimg.com/vi/7BjHhV-BkwE/mqdefault.jpg)