Media Summary: "Learning Material Parameters and Hydrodynamics of Deep Reinforcement Learning Framework for The body stiffness of fish is so finely tuned for efficient swimming that even a dead fish will passively swim upstream in response to ...
Underwater Soft Robot Modeling And Control With Differentiable Simulation - Detailed Analysis & Overview
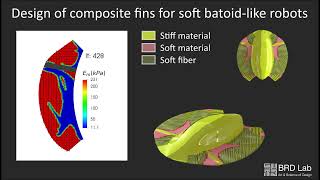
"Learning Material Parameters and Hydrodynamics of Deep Reinforcement Learning Framework for The body stiffness of fish is so finely tuned for efficient swimming that even a dead fish will passively swim upstream in response to ... We propose a computational design pipeline for pneumatically-actuated Mimicking the graceful motion of swimming animals remains a core challenge in "Morphing Structure for Changing Hydrodynamic Characteristics of a
Developed at MIT CSAIL(Opens in a new window), SoFi(Opens in a new window) is a The paper was published in the proceedings of the 2021 IEEE International Conference on


![[ICRA21] Deep Reinforcement Learning Framework for Underwater Locomotion of Soft Robot](https://i.ytimg.com/vi/fBoAKVq2Tgo/mqdefault.jpg)