Media Summary: First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... In the context of robotics, accurate ground-truth positioning is the cornerstone A robot makes a loop around a lab. Using monocular SLAM (iSAM2) and BRISK features, it finds an
Tutorial 4 Extrinsic Calibration - Detailed Analysis & Overview
First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... In the context of robotics, accurate ground-truth positioning is the cornerstone A robot makes a loop around a lab. Using monocular SLAM (iSAM2) and BRISK features, it finds an I'm going to use input channel one of my hardware which is set to my audio connect and Have you ever encountered the frustrating issue of your lens not consistently achieving pinpoint sharpness when using autofocus ... Accurate measurements in Computer Vision are impossible without camera calibration. In this step-by-step tutorial, we explain ...
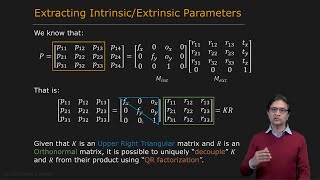
In this paper we propose a new uncomplicated technique













![How to calibrate lens autofocus WITHOUT buying a tool! [Lens Calibration Tip]](https://i.ytimg.com/vi/aAiGyl5CKlQ/mqdefault.jpg)