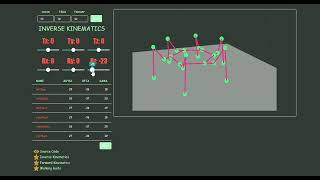
Media Summary: All the geometric testing and debugging was developed via CoppliaSim. A test recording of a stable, interactive 3D 3D Model by Ahmed Essam Omar Scripting on
Tas Hexapod Robot On Vrep Simulator Walking Interface With Python - Detailed Analysis & Overview
All the geometric testing and debugging was developed via CoppliaSim. A test recording of a stable, interactive 3D 3D Model by Ahmed Essam Omar Scripting on ... code now that we have all our inverse kinematics everybody skips over this part it just goes straight to the Maged M. Abou Elyazed, contact force simmechanics hexapod model follow a staright path path planning