Media Summary: Online Trajectory Generation with Distributed Model Predictive Control for Multi-Robot Motion Planning This video introduces the master thesis work of Mr. Hao Li. Different schemes of This paper appears in: IEEE Transactions on Control Systems Technology Print ISSN: 1063-6536
Online Trajectory Generation With Distributed Mpc For Multi Robot Motion Planning - Detailed Analysis & Overview
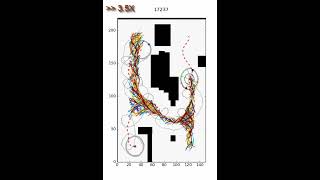
Online Trajectory Generation with Distributed Model Predictive Control for Multi-Robot Motion Planning This video introduces the master thesis work of Mr. Hao Li. Different schemes of This paper appears in: IEEE Transactions on Control Systems Technology Print ISSN: 1063-6536 Matthew Turpin, Nathan Michael, Vijay Kumar video submission to ICRA 2013. L. Ferranti, R. R. Negenborn, T. Keviczky and J. Alonso-Mora, "Coordination of Multiple Vessels Via Multi-robot head-on collision avoidance using centralized Model Predictive Control
Autonomy Talks - 19/07/2022 Speaker: Prof. Laura Ferranti, TU Delft Title: An Optimization-based Framework for Local ( Paul Ladinig, Bernhard Rinner, Stephan Weiss: Time and Energy Optimized


![Multi-Robot Planning [Lecture, Marija Popović]](https://i.ytimg.com/vi/Wcvw8qyUan8/mqdefault.jpg)