Media Summary: Video associated to the paper F. Pagano, S. Marcellini, M. Selvaggio, V. Lippiello, F. Ruggiero, " Supplemental video to our paper published at IEEE Access on Occlusion-Free Target L. Ferranti, R. R. Negenborn, T. Keviczky and J. Alonso-Mora, "Coordination of
Multi Robot Nonlinear Model Predictive Control For Persistent Monitoring - Detailed Analysis & Overview
Video associated to the paper F. Pagano, S. Marcellini, M. Selvaggio, V. Lippiello, F. Ruggiero, " Supplemental video to our paper published at IEEE Access on Occlusion-Free Target L. Ferranti, R. R. Negenborn, T. Keviczky and J. Alonso-Mora, "Coordination of Presentation for the IEEE International Conference on ... Optimization-Based Reference Generator for This work is currently under review, a preprint is available: ...
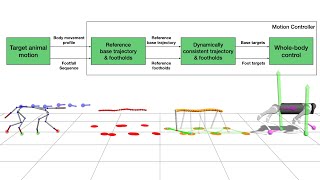
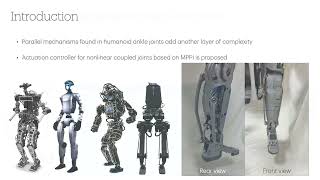
Presentation for the IROS 2022 paper "Animal Motions on Legged Supplementary video for the IROS 2022 paper "Animal Motions on Legged This video summarizes the main results obtained with the paper "A Authors: Gunoo Park, Jaewan Bak, Yunsoo Seo, Euncheol Im, Hoseok Lee, Jongbok Lee, Jongwon Lee, and Yisoo Lee Abtract: ... Paper: Code: Visit our page for more details: ... Abstract — We introduce a real-time, constrained,
Vision-Based Non-Linear Model Predictive Control for Last-Mile Delivery Robot Local Motion Planning This video presents the ICRA 2023 talk associated with the paper entitled "Time-inverted Kuramoto Multimedia material of paper "Safety-Aware