Media Summary: What do you do if you need a *really* smooth This video demonstrates our recent work conducted in the following research. Chengkai Dai, Sylvain Lefebvre, Kai-Ming Yu, ... Cite: Jee-eun Lee, Andrew Bylard, Robert Sun, and Luis Sentis, On the Performance of
Jerk Continuous Online Trajectory Generation For Robot Manipulator - Detailed Analysis & Overview
What do you do if you need a *really* smooth This video demonstrates our recent work conducted in the following research. Chengkai Dai, Sylvain Lefebvre, Kai-Ming Yu, ... Cite: Jee-eun Lee, Andrew Bylard, Robert Sun, and Luis Sentis, On the Performance of time optimal path following with jerk constraints MEAM 620 - A* planning and minimum jerk trajectory generation Velocity Following Minimum Jerk Trajectory Generation
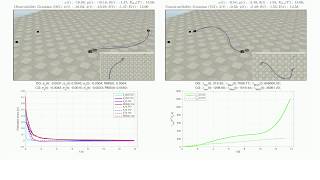
When user moves blue ball by mouse on screen, This is my work with my colleague on using neural networks to learn minimum snap optimization for The attached video shows the simulation results of " Minimum Jerk Trajectory Generation with Obstacle Avoidance In International Symposium on Flexible Automation 2022 Paper link: Contact: ...














![[ISFA 2022] Safe Interactive Industrial Robots using Jerk-based Safe Set Algorithm](https://i.ytimg.com/vi/lJvyZ5iRvVQ/mqdefault.jpg)
![[AIM 2022] Jerk-bounded Position Controller with Real-Time Task Modification](https://i.ytimg.com/vi/bha6pHhytZA/mqdefault.jpg)