Media Summary: A final demonstration of our neural network prediction controller, and our extended variable impedance controller for "Towards Multi-Modal Intention Interfaces for Dr. Luka Peternel Delft University of Technology Title of The talk: Ergonomic control of
Human Robot Co Manipulation - Detailed Analysis & Overview
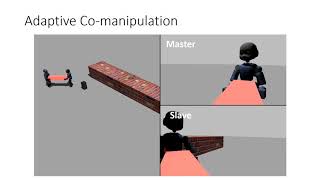
A final demonstration of our neural network prediction controller, and our extended variable impedance controller for "Towards Multi-Modal Intention Interfaces for Dr. Luka Peternel Delft University of Technology Title of The talk: Ergonomic control of Complementary video for ICRA 2020 paper "A Dynamical System Approach for Adaptive Grasping, Navigation and ... Human Robot Co-operative Manipulation - Nao robot lifting a table co-operatively with a human Luka Peternel - Ergonomic control of human robot co-manipulation
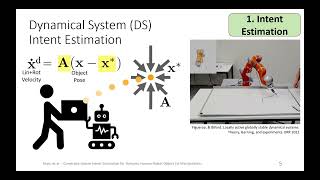
Presentation by Luka Peternel (Delft University of Technology, Netherlands) at the Workshop on This video shows that we can estimate whether a dyad is performing a task quickly, smoothly, or trying to avoid obstacles. This video shows an application of the iTaSC-methodology to an overconstrained task involving For details, please check our paper: "A Dynamical System Approach to Task-Adaptation in Physical Link: Abstract: Constraint-aware estimation of The HRII lab of IIT proposed a novel method for the control of
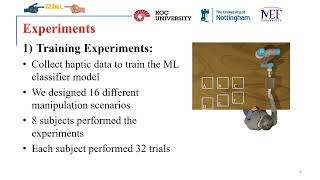
Supplementary video for the following paper submitted to ICRA 2020: "A Dynamical System Approach for Adaptive Grasping, ... A machine learning (ML) approach to detect and resolve motion conflicts that occur between a In this work, the HRII lab of IIT proposes a novel method for










![Adaptive physical Human-Robot Interaction using Dynamical Systems [kuka LWR 4+]](https://i.ytimg.com/vi/oqHJ8crB5KY/mqdefault.jpg)