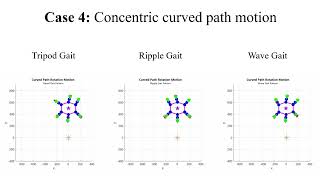
Media Summary: Gate: tripod Map: 5 % of obstacles occupation. Gate: wave Map: 10% of obstacles occupation. The Emmy Noether Research group for "Neural Control, Memory, and Learning for Complex Behaviors in Multi Sensori-Motor ...
Hexapod Walking Simulation - Detailed Analysis & Overview
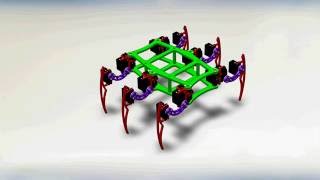
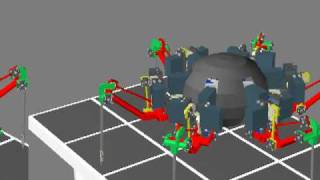
Gate: tripod Map: 5 % of obstacles occupation. Gate: wave Map: 10% of obstacles occupation. The Emmy Noether Research group for "Neural Control, Memory, and Learning for Complex Behaviors in Multi Sensori-Motor ... Walking simulation of hexapod based on kinematics Modeled with Solidworks 2016. Rendered with Simlab Composer 8 Mechanical Edition. Free 3D model at This video demonstrates the Virtual Robot Experimentation Platform (V-REP: ) simulating a ...