Media Summary: Xu Fang, Chen Wang, Lihua Xie, Jie Chen, "Cooperative Pursuit with Multi-Pursuer and One Faster Free-moving Evader", IEEE ... Student project within a course "Programming in robotic operating system-ROS". 4 quadrotors achieve the predefined time-varying
Formation Control For Uavs With Switching Topologies - Detailed Analysis & Overview
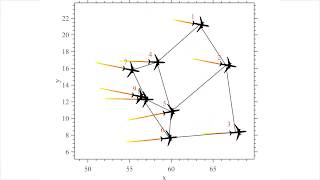
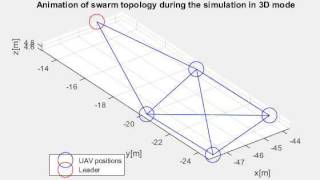
Xu Fang, Chen Wang, Lihua Xie, Jie Chen, "Cooperative Pursuit with Multi-Pursuer and One Faster Free-moving Evader", IEEE ... Student project within a course "Programming in robotic operating system-ROS". 4 quadrotors achieve the predefined time-varying This MATLAB/Simulink simulation shows fixed-wing Video shows accelerated animation of simulation captured here: Time-varying formation control of multi-UAV with tree network
Pdf of the discussed Paper: Don't forget to like and subscribe !! Distributed Formation Control and Navigation of Fixed-wing UAVs at Constant Altitude