Media Summary: Riccardo Falconi, Lorenzo Sabattini, Cristian Secchi, Cesare Fantuzzi, Claudio Melchiorri. This MATLAB/Simulink simulation shows fixed-wing UAVs decentralized collective motion First experiment running all robot leader - follower (NAO1-red) as the leader and the rest as the follower. Only NAO1 know where ...
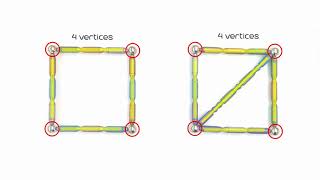
Edge Weighted Consensus Based Formation Control Strategy With Collision Avoidance - Detailed Analysis & Overview
Riccardo Falconi, Lorenzo Sabattini, Cristian Secchi, Cesare Fantuzzi, Claudio Melchiorri. This MATLAB/Simulink simulation shows fixed-wing UAVs decentralized collective motion First experiment running all robot leader - follower (NAO1-red) as the leader and the rest as the follower. Only NAO1 know where ... A group of differential wheeled robots exploit Formation control: Creating formation with obstacles ... this formation from this one or this one from this one well let's see how the distance
Live presentation of the paper "Model Reduction of Space debris is congesting space and becoming an increasingly serious problem. In addition, more and more satellites are being ... Multi-agent formation control for homogenous system using model consesus The GRITSbots form a rectangular shape using