Media Summary: Manual derivation of optimal robot motions for task completion is difficult, especially when a robot is required to balance its actions ... In this tutorial I did several experiments to train a robot to avoid Our Company: (Indoor GPS & Autonomous Driving AGV & Cobot)
Dynamic Obstacle Avoidance Using Pearl - Detailed Analysis & Overview
Manual derivation of optimal robot motions for task completion is difficult, especially when a robot is required to balance its actions ... In this tutorial I did several experiments to train a robot to avoid Our Company: (Indoor GPS & Autonomous Driving AGV & Cobot) Creativity is intelligence having fun .. Lab is always fun playing In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... This work was carried out by Bradley Kohler, Ya-Jun Pan and Robert Bauer at the Advanced Control and Mechatronics Lab, ...
Key Capabilities Demonstrated: ✓ Real-Time Path Planning – Autonomous route optimization ✓ Robot Manipulator's Dynamic Obstacle Avoidance Obstacle Avoidance using Lidar with Dynamic Obstacle on Gazebo Simulation A simulated experiment demonstrating manipulation on-the-move in an environment This video is a demonstration of the Deep Reinforcement Learning Policies from the paper "Comparison of Deep Reinforcement ... This is the implementation of time scaled
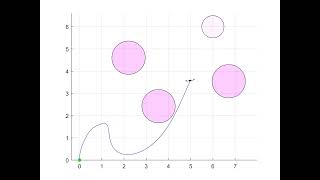
Dynamic Obstacle Avoidance without DOL using VICON In this demo, I set up two turtlebot3 robots to perform navigation task while avoiding Local path planning considering static and This video illustrates a planar quadrotor (quadrotor confined to the 2D plane) avoiding three More info: git.com:GPrathap/trajectory-tracker.git.