Media Summary: Video overview of our recent IEEE Transactions on The article, which is published in the IEEE Conference on Intelligent Authors: Dinh Quang Nguyen and Van Anh Ho Presenter: Dinh Quang Nguyen In this paper, the swimming efficiency of a
Design And Testing Of A Multi Module Tetherless Soft Robotic Eel - Detailed Analysis & Overview
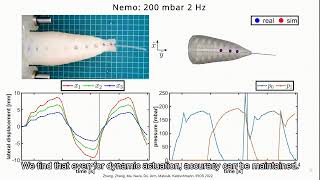
Video overview of our recent IEEE Transactions on The article, which is published in the IEEE Conference on Intelligent Authors: Dinh Quang Nguyen and Van Anh Ho Presenter: Dinh Quang Nguyen In this paper, the swimming efficiency of a In this video, we demonstrate the creation of a by Yuhao Jiang, Serge El Asmar, Ziqiao Wang, Serhat Demirtas, and Jamie Paik Reconfigurable "Learning Material Parameters and Hydrodynamics of
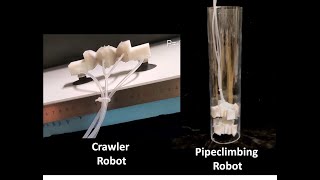
Max McCandless, Frank Juliá Wise, and Russo S., "A 2021 IEEE RAS Seasonal School on Rehabilitation and Assistive Technologies based on Inspired by Waterbomb-Kresling origami, we developed three types of vacuum-driven