Media Summary: Authors: Cosimo Della Santina, and Daniela Rus Title: A team of material scientists and electronic engineers at MIT, has developed a way to create magnetic This is the spotlight talk for our paper on
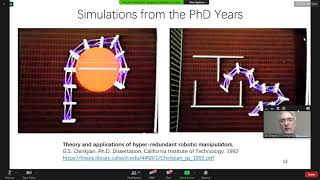
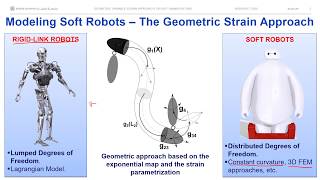
Control Oriented Modeling Of Soft Robots The Polynomial Curvature Case - Detailed Analysis & Overview
Authors: Cosimo Della Santina, and Daniela Rus Title: A team of material scientists and electronic engineers at MIT, has developed a way to create magnetic This is the spotlight talk for our paper on In this work, we derived the compressible D. Bruder, B. Gillespie, C. D. Remy, and R. Vasudevan, “ This is the video presentation of the paper below. We developed a model-based
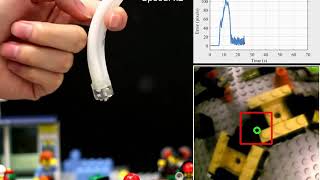
Vision based Online Learning Kinematic Control for Soft Robots Department Seminar hosted by Virginia Tech Mechanical Engineering Abstract: Compliant and Recorded presentation for IEEE RoboSoft 2020. Reference: F. Renda, C. Armanini, V. Lebastard, F. Candelier and F. Boyer, "A ... Scientists in Polina Anikeeva's lab at MIT's McGovern Institute have developed tiny, Accompanying video for my Eurographics 2021 short paper.