Media Summary: Authors: Yuval Tassa, Nicolas Mansard, Emo Todorov Article published in IEEE ICRA 2014 (Hong Kong) ... In this work we aim to answer the question how we can leverage the This video includes extensive simulation and hardware results for the IEEE Transactions on Robotics (TRO) paper: A. D. ...
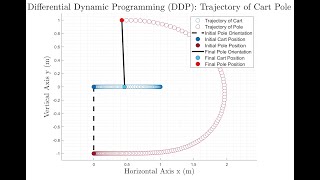
Control Limited Differential Dynamic Programming - Detailed Analysis & Overview
Authors: Yuval Tassa, Nicolas Mansard, Emo Todorov Article published in IEEE ICRA 2014 (Hong Kong) ... In this work we aim to answer the question how we can leverage the This video includes extensive simulation and hardware results for the IEEE Transactions on Robotics (TRO) paper: A. D. ... Crocoddyl: An Efficient and Versatile Framework for Multi-Contact Optimal Highly Dynamic Maneuvers computed by Feasible-driven Differential Dynamic Programming Affiliation: 4th-year undergraduate student, Daniel Guggenheim School of Aerospace Engineering, Georgia Institute of ...
Presentation for the IEEE International Conference on Robotics and Automation (ICRA) 2021. Paper available at: ... N. Ramuzat, F. Forget , V. Bonnet , M. Gautier, S. Boria , O. Stasse, Toulouse, France We would like to validate a non Highly Dynamic Maneuvers computed by Feasible-prone Differential Dynamic Programming