Media Summary: Unlike rigid robots which operate with compact degrees of freedom, 'Doing the robot' on the dancefloor would look more like 'doing the worm' if the dance move was inspired by This is the video presentation of the paper below. We developed a model-based control approach for
Co Learning Of Task And Sensor Placement For Soft Robotics - Detailed Analysis & Overview
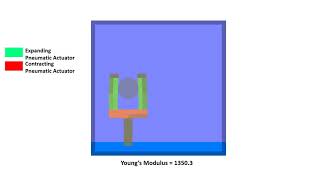
Unlike rigid robots which operate with compact degrees of freedom, 'Doing the robot' on the dancefloor would look more like 'doing the worm' if the dance move was inspired by This is the video presentation of the paper below. We developed a model-based control approach for Speaker: Dr. Florian Hartmann (Max Planck Institute for Intelligent Systems) About the RIG Lecture Series ... Authors: Andrew Spielberg, Allan Zhao, Tao Du, Yuanming Hu, Daniela Rus, Wojciech Matusik Researchers have devoted to developing a variety of
Full episode with Russ Tedrake (Aug 2020): Clips channel (Lex Clips): ... In this video, we introduce experiment results of a novel model-free optimal MIT researchers have developed an algorithm to help engineers design This video discusses the important problem of how to select the fewest and most informative Video presentation for the 2020 3rd IEEE International Conference on A new type of robot combines traditional and
Mechanical engineering Ph.D. student Caroline Schell and Peter Bui, a research associate, introduce the science of