Media Summary: Lecture 1.3. Wherein we introduce and explore the operation of the Book : Choset, H., Lynch, K. M., Hutchinson, S., Kantor, G., Burgard, W., Kavraki, L., & Thrun, S. (2005). Principles of Robot Motion: ... The shown robot (SparkFun Redbot) is shown to avoid obstacles and reach the goal using the different
Bug 1 Algorithm - Detailed Analysis & Overview
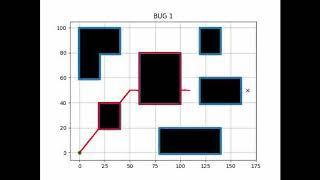
Lecture 1.3. Wherein we introduce and explore the operation of the Book : Choset, H., Lynch, K. M., Hutchinson, S., Kantor, G., Burgard, W., Kavraki, L., & Thrun, S. (2005). Principles of Robot Motion: ... The shown robot (SparkFun Redbot) is shown to avoid obstacles and reach the goal using the different Bug1 Algorithm working in different environments tangent bug algorithm: avoiding concave obstacle tangent bug algorithm: avoiding local minima (following boundary behavior)
The explanation of a simple path planning This demo is from homework from EE596 Robot motion planning Course at Ankara Yildirim Beyazit University.The point robot ... In this video, the 9th of the series Exploring ROS with a 2 Wheeled Robot, we are gonna see the


















![[ROS Projects] - Bug 0 Foil vs. Bug 1 - Exploring ROS With a 2 wheeled Robot - Part 9](https://i.ytimg.com/vi/C1mzAGNZ0K4/mqdefault.jpg)