Media Summary: In this video, we present a high-fidelity simulator of a IEEE International Conference on Control, Automation and Soft Robotic Snake Version 3 - Tetherless
Analytical Modeling Of A Soft Robotic Snake - Detailed Analysis & Overview
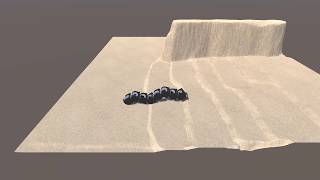
In this video, we present a high-fidelity simulator of a IEEE International Conference on Control, Automation and Soft Robotic Snake Version 3 - Tetherless A team of researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) has developed a ... IEEE International Conference on Automation Science and Engineering (CASE ), August 23-27, 2021, Lyon, France. Paper: ... Presentation @ IROS 2020: Abstract In this paper, we present a new locomotion control method for
Motion Planning and Iterative Learning Control of a Modular Soft Robotic Snake
![[ICRA 2019] A Validated Physical Model for Real-Time Simulation of Soft Robotic Snakes](https://i.ytimg.com/vi/wUAGTeKtKsc/mqdefault.jpg)