Media Summary: 16.412/6.834J Cognitive Robotics - Spring 2019 Professor: Brian Williams MIT. MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ... This video demonstrates our work published in the following paper. Chenming Wu, Chengkai Dai, Xiaoxi Gong, Yong-Jin Liu, Jun ...
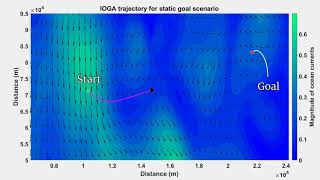
Advanced Lecture 2 Energy Efficient Path Planning In Uncertain Environments - Detailed Analysis & Overview
16.412/6.834J Cognitive Robotics - Spring 2019 Professor: Brian Williams MIT. MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ... This video demonstrates our work published in the following paper. Chenming Wu, Chengkai Dai, Xiaoxi Gong, Yong-Jin Liu, Jun ... Explore simple thermostat settings to optimize Project showcase by Minghan Wei of the Robotic Sensor Networks Lab. The RSN Lab is led by Volkan Isler, Professor in the ... similar climate conditions led to similar design solutions in traditional residential buildings; based on my science research, ...
2026 - The Path to Net Zero - Quantum Performance [16.412] Sp18 Advanced Lecture: Multi-agent Path Planning II - part 2 This speech delivered by Assoc Prof Dr. Chao Zuo, Zhejiang Gongshang University, China International Research Awards on ... A ROS Gazebo simulation using a hybrid of a Hector quadrotor and a Rover. Octomap is used for the 3D occupancy grid and the ... [16.412] Sp18 Advanced Lecture: Multi-agent Path Planning II - part 1







![[16.412] Sp18 Advanced Lecture: Multi-agent Path Planning II - part 2](https://i.ytimg.com/vi/wmxmMMhM9TU/mqdefault.jpg)





![[16.412] Sp18 Advanced Lecture: Multi-agent Path Planning II - part 1](https://i.ytimg.com/vi/WiQUJ0pKcT0/mqdefault.jpg)